Product Overview
Reliable custom rubber parts for industrial applications
Quick Answer
Quadruped Robot Rubber Foot Pads and Joint Clamps are custom elastomer components for robot dog platforms, humanoid robot modules and mobile robotic equipment. They support anti-slip contact, impact cushioning, vibration buffering and joint protection. Pad shape, clamp profile, rubber material, hardness, color, tolerance and packaging are available upon request.
Quadruped Robot Rubber Foot Pads and Joint Clamps are custom elastomer components used for robot dog mobility, ground contact protection, joint area support and vibration buffering. The product set can include four groups of rubber accessories for leg-end contact and articulated joint protection. Dimensions, material, hardness, structure and tolerance are available upon request.
Quadruped Robot Rubber Foot Pads and Joint Clamps — Wear-Resistant Rubber Component Set
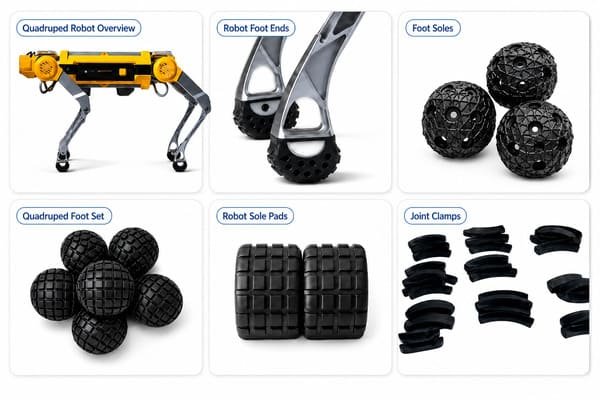
This Quadruped Robot Rubber Foot Pads and Joint Clamps set covers the essential rubber wear components for four-legged robotic platforms, including textured foot sole pads, spherical foot end caps, and curved joint clamps that protect and cushion the robot’s leg structure. Molded from durable rubber compounds, these components are engineered to withstand repeated ground impact, joint articulation, and outdoor terrain contact across the full mobility system of a quadruped robot.
Product Set Overview
| Component | Function |
|---|---|
| Robot Foot Ends | Molded rubber tips that attach to the lower leg linkage |
| Foot Soles (Spherical) | Textured spherical rubber caps providing ground contact and traction |
| Quadruped Foot Set | Complete set of spherical foot pads for all leg contact points |
| Robot Sole Pads (Cylindrical) | Ribbed cylindrical rubber pads for alternate foot-end configurations |
| Joint Clamps | Curved rubber clamp segments for leg joint protection and cable/hose retention |
Robot Foot Ends and Spherical Sole Pads
The robot foot end assembly combines a rigid structural tip with a molded spherical rubber sole, creating a ball-like ground contact point that allows the leg to pivot and adjust naturally across uneven terrain. Each spherical foot sole features a deep, multi-directional textured tread pattern across its surface, maximizing surface-area grip when the foot strikes the ground at varying angles during walking, trotting, or running gaits. A central mounting bore runs through each sphere, allowing it to be securely fastened to the leg’s foot-end bracket while still permitting slight rotational give to absorb impact shock.
Quadruped Foot Set (Complete Spherical Pad Set)
This set comprises multiple spherical foot pads, sized to outfit all four legs of a quadruped robot platform, ensuring consistent traction and wear characteristics across every ground contact point. Supplying the pads as a matched set allows replacement of all four feet simultaneously, maintaining uniform grip performance and gait balance across the robot’s full range of motion.
Robot Sole Pads (Cylindrical/Ribbed Design)
As an alternate foot-end configuration, these cylindrical rubber pads feature a dense ribbed tread pattern running perpendicular to the pad’s rolling axis, offering a wider, flatter ground contact area compared to the spherical design. This style is well suited to platforms requiring greater stability on flat or moderately uneven surfaces, trading some of the spherical pad’s multi-directional flexibility for increased static footprint and stability.
Joint Clamps
The joint clamp set consists of curved, arc-shaped rubber segments designed to wrap around and protect the robot’s leg joint housings, motor connections, or exposed cable and hose routing at articulation points. These clamps provide cushioning against impact, help retain internal wiring or hydraulic lines in place during repeated joint flexing, and add a layer of environmental sealing against dust and moisture ingress at moving joint interfaces.
Material and Performance Characteristics
- High Abrasion Resistance: Rubber compounds selected for these components resist wear from repeated ground contact and joint articulation cycles.
- Impact Absorption: Both spherical and cylindrical foot pad designs are engineered to dampen shock transmitted through the leg structure during walking, running, or jumping movements.
- Multi-Directional Traction: The deep textured tread pattern on spherical foot soles maintains grip regardless of the angle at which the foot contacts the ground.
- Flexible Joint Protection: Joint clamps use pliable rubber construction to flex naturally with joint movement while maintaining a secure protective fit.
- Environmental Resistance: Components are formulated to withstand outdoor exposure, including temperature variation, moisture, and dust encountered during field deployment.
Key Features
- Complete rubber component coverage for quadruped robot leg assemblies, from foot contact to joint protection.
- Two distinct foot pad geometries (spherical and cylindrical) available for different terrain and stability requirements.
- Matched four-leg foot sets ensure consistent traction and gait balance.
- Curved joint clamps protect cable routing and joint housings from impact and environmental exposure.
- Durable rubber compounds engineered for repeated high-cycle mechanical loading.
Common Applications
- Quadruped robotic platforms for research, industrial inspection, or field deployment.
- Robotic leg assemblies requiring replaceable wear components at ground contact points.
- Joint and cable protection for articulated robotic limb systems.
- Outdoor and rough-terrain robotic mobility platforms requiring enhanced traction.
- Maintenance and replacement parts programs for legged robotic systems.
Why Rubber Components Matter for Legged Robots
Ground contact and joint articulation points on a quadruped robot experience some of the highest repeated mechanical stress in the entire platform, making replaceable rubber components essential for extending the service life of the robot’s structural and mechanical systems. Textured rubber foot pads directly influence traction performance and gait stability across varied terrain, while joint clamps protect sensitive cable routing and mechanical linkages from the repeated flexing and environmental exposure encountered during operation, reducing the risk of costly damage to non-replaceable internal components.
Custom Manufacturing Options
- Custom foot pad diameter, tread pattern, and mounting bore configuration.
- Custom rubber hardness grade for different traction or cushioning requirements.
- Custom joint clamp curvature and length to match specific leg joint geometries.
- Custom color for component identification or platform branding.
- Custom rubber compound selection for specialized temperature or chemical resistance needs.
FAQ
What are quadruped robot rubber foot pads used for?
Quadruped robot rubber foot pads are used at robot leg-end contact points to improve grip, cushion impact, reduce contact noise and protect hard mechanical parts. They are suitable for robot dog platforms, inspection robots and mobile robotic equipment.
What are robot rubber joint clamps used for?
Robot rubber joint clamps are used around compatible joint areas, housings or articulated interfaces. They can provide protective contact, positioning support, vibration buffering or wear protection depending on the confirmed clamp structure and installation method.
Can the foot pad and joint clamp dimensions be customized?
Yes. Foot pad size, pad thickness, contact surface profile, clamp inner profile, wall thickness, mounting holes, fixing slots and dimensional tolerance are available upon request. Accurate robot interface information is required for proper fit.
How should the rubber hardness be selected?
Shore A hardness should be selected according to load, ground surface, required grip, impact cushioning, rebound behavior and wear resistance. A softer compound may improve grip and cushioning, while a harder compound may provide firmer support and better wear behavior in some applications.
Which rubber material is suitable for robotic foot pads?
Material selection depends on working environment, surface contact, abrasion requirement, temperature, outdoor exposure and load condition. Options can be reviewed according to grip, wear resistance, flexibility, tear resistance, vibration damping and weather resistance requirements.
Are samples available before bulk production?
Samples are available upon request. Sample preparation depends on confirmed geometry, rubber compound, Shore A hardness, color, tooling status, inspection requirements and packaging method. A robot interface sample helps verify installation fit and motion performance.
Request a Custom Quote
Send the confirmed specification, 3D model, physical sample or robot interface information for review. Please include foot pad size, clamp profile, mounting interface, rubber material, hardness, ground surface, load condition, motion frequency, quantity, annual demand and packaging method.







